Three new scenes have been added to the website. They can be downloaded running the scene installer script like this: "./installScene -s SCENE". These scenes show three different scenarios for pipe following with different difficulty. In pipefollowing_basic.uws a simple straight green pipe is placed at the seafloor. pipefollowing_heights.uws adds pipe sections so the depth of the pipe changes. Finally pipefollowing_turns.uws adds L joints so the vehicle must turn to follow the pipe.
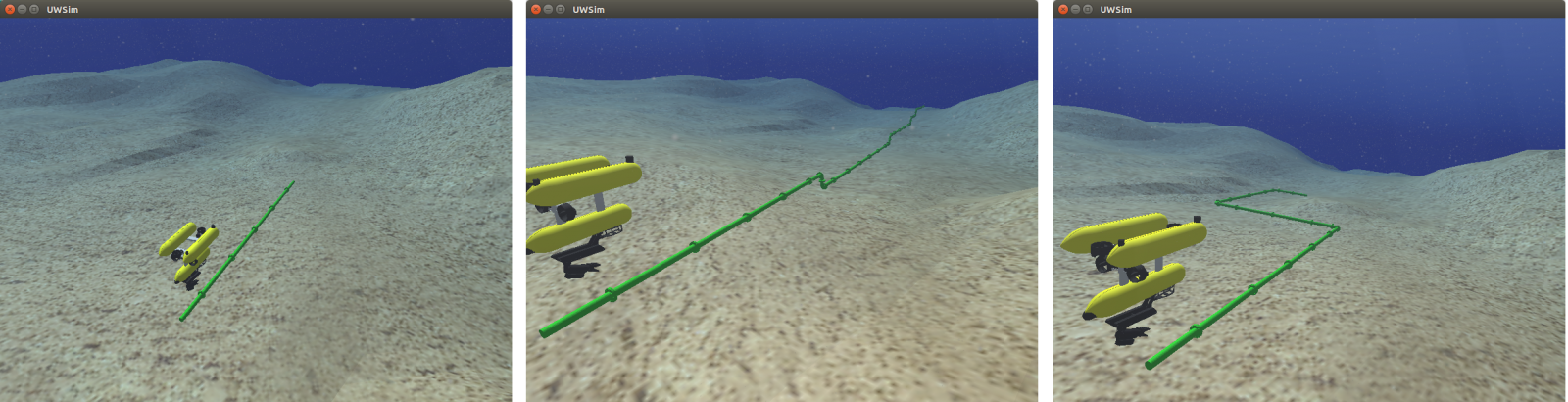
In each scene the vehicle girona500 is placed in an end of the pipe in order to follow until the end of it. Furthermore the pipes are green in order to make it easier to detect and segment them using a virtual camera already present in the vehicle. Shortly we will add a series of tutorial exercises that will help to understand the use of some features such as reading sensors, benchmarking and dynamics.









