
Follow UWSim on:








Gallery
|
A suface vehicle (Delfim) and an underwater vehicle (Girona500). Light refraction effects can be appreciated. Thanks to the IST/LARSyS and the Dynamical Systems and Ocean Robotics (DSOR) Laboratory for the Delfim 3D model, and to University of Girona/CIRS for the Girona500 model. |
A ship sailing the ocean. The 3D model of the ship was obtained from the Google 3D Warehouse.
|
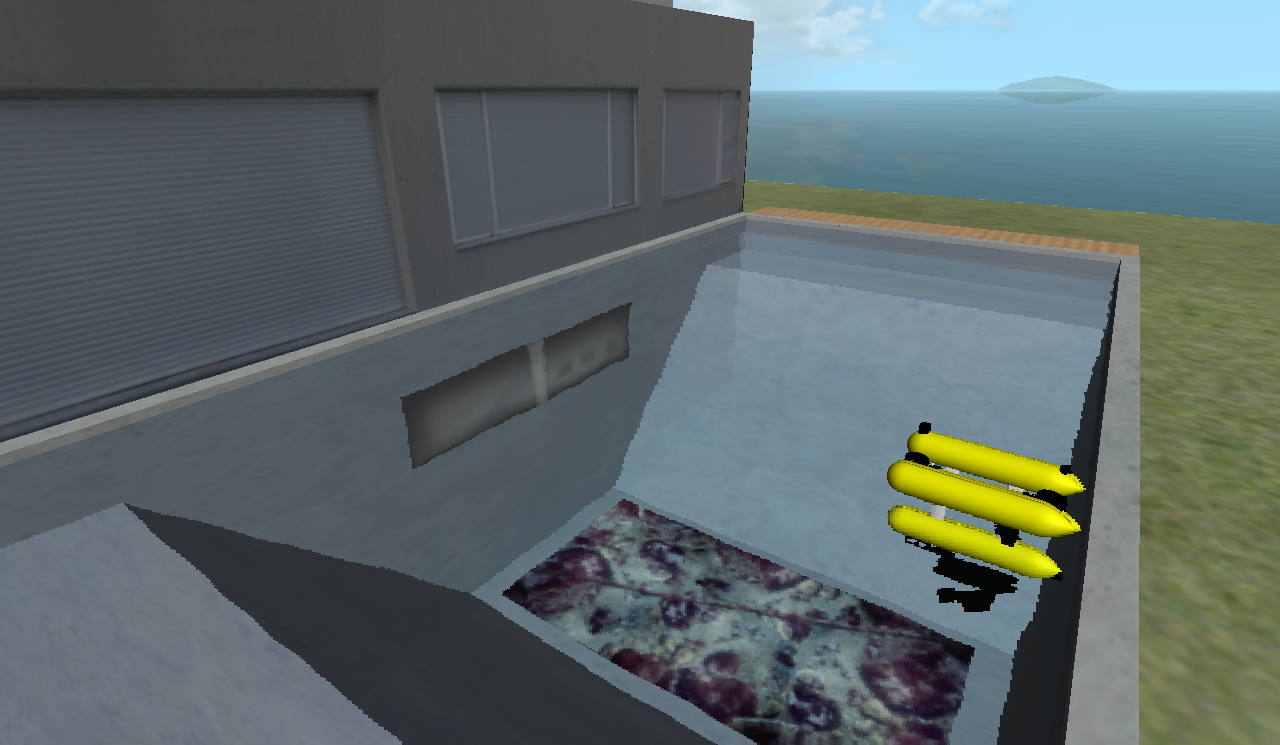
A 3D model of the CIRS water tank (University of Girona. Spain) and their Girona500 Intervention Autonomous Underwater Vehicle. The manipulator attached to the Girona500 is the CSIP Lightweight ARM5e available at University of Jaume-I (Castellón, Spain). |
|
A shipwrech scene showing two underwater vehicles (Girona500/ARM5e). |
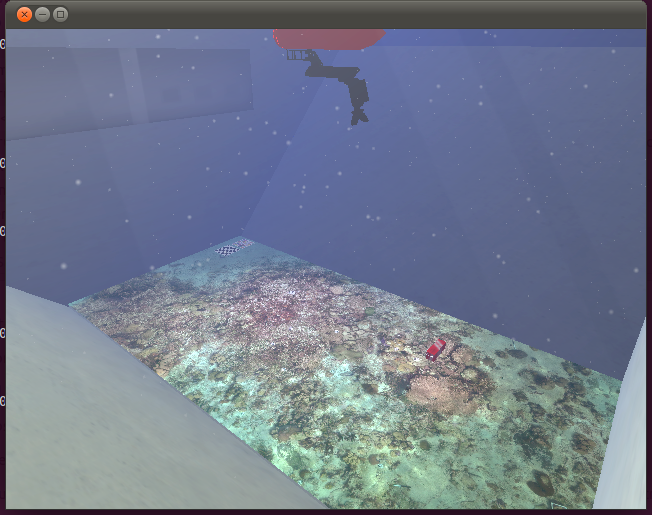
A use case of UWSim as a visualization of the results of a grasp planning algorithm on a 3D point cloud obtained from the seafloor. |
Large terrains and textures can be loaded in multi-resolution mode. This scene includes the floor poster used for experiments at the CIRS water tank. The poster is loaded from large image of more than 1 Gb. |




See more videos in our IRSLab Youtube Channel!