
Project information
Download the poster in PDF !!!
General info:
- ICT Call: FP7-ICT-2009-4.
- ID: 248497 - TRIDENT
- Title: Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions
- Duration: 36 months
- Funding: 3,248 Keuros
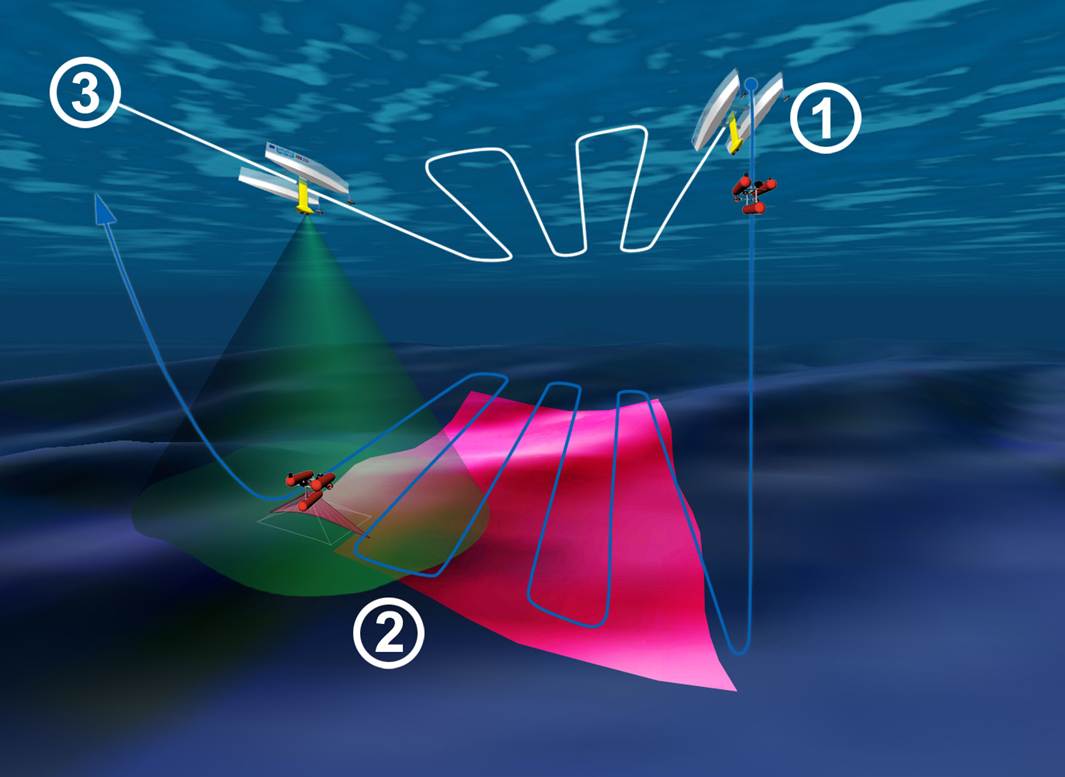
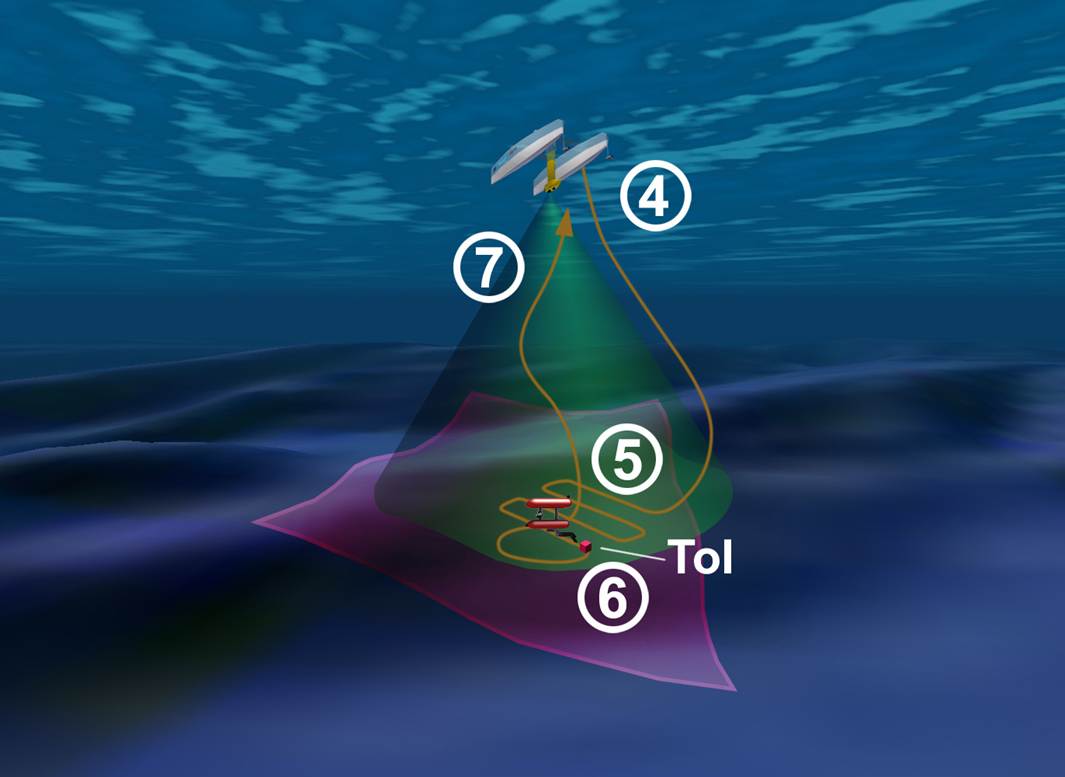
This project proposes a new methodology to provide multipurpose dexterous manipulation capabilities for intervention operations in unknown, unstructured and underwater environments. In the TRIDENT project, a multipurpose generic intervention is composed of two phases:
Project objectives
Cooperative navigation techniques to achieve robust, high accuracy navigation (localization) of all the vehicles involved in the robotic team.
Scientific Advisory Board


Related projects
