







All the RAUVI team are very proud about the successful result obteined in this second integration meeting. Here you will watch some relevant videos recorded along the meeting:
- After the initial tests in Castellón, the UJI team needed to test the grasping and hooking algorithm in a more realistic environment, such as the big swimming pool located in the Girona University. This video shows how the robotic arm hooks a Black-Box in two different conditions: first without disturbance and then with low disturbace generated over the structure which holds the arm:
- Once the arm was added to the robot, we started to test the hook algorithm when the arm was mounted in the robot. Furthermore, an initial comuncation between arm and robot to modify the position was implemented. In this video, the arm fails in the first attempt to hook the target, but finally gets it after a correction in the robot position:
- We can take a look closer to the hooking algorithm thanks to the next video, which shows template tracking of a Black-Box. The green box marks the area selected manually by the user (this part will be got from the graphical user interface in the next version). The red arrows indicate the "Object Frame" (the object position with respect to the camera), while the yellow arrows indicate the "Grasp Frame" (the position where the hook should be moved):
- The first part in an intervention mission is the survey mission. The user specifies the survey mission, thanks to the Graphical User Interface (GUI). Once the mission is defined, the robot executes it and takes photos, which will be used to build a photomosaic:
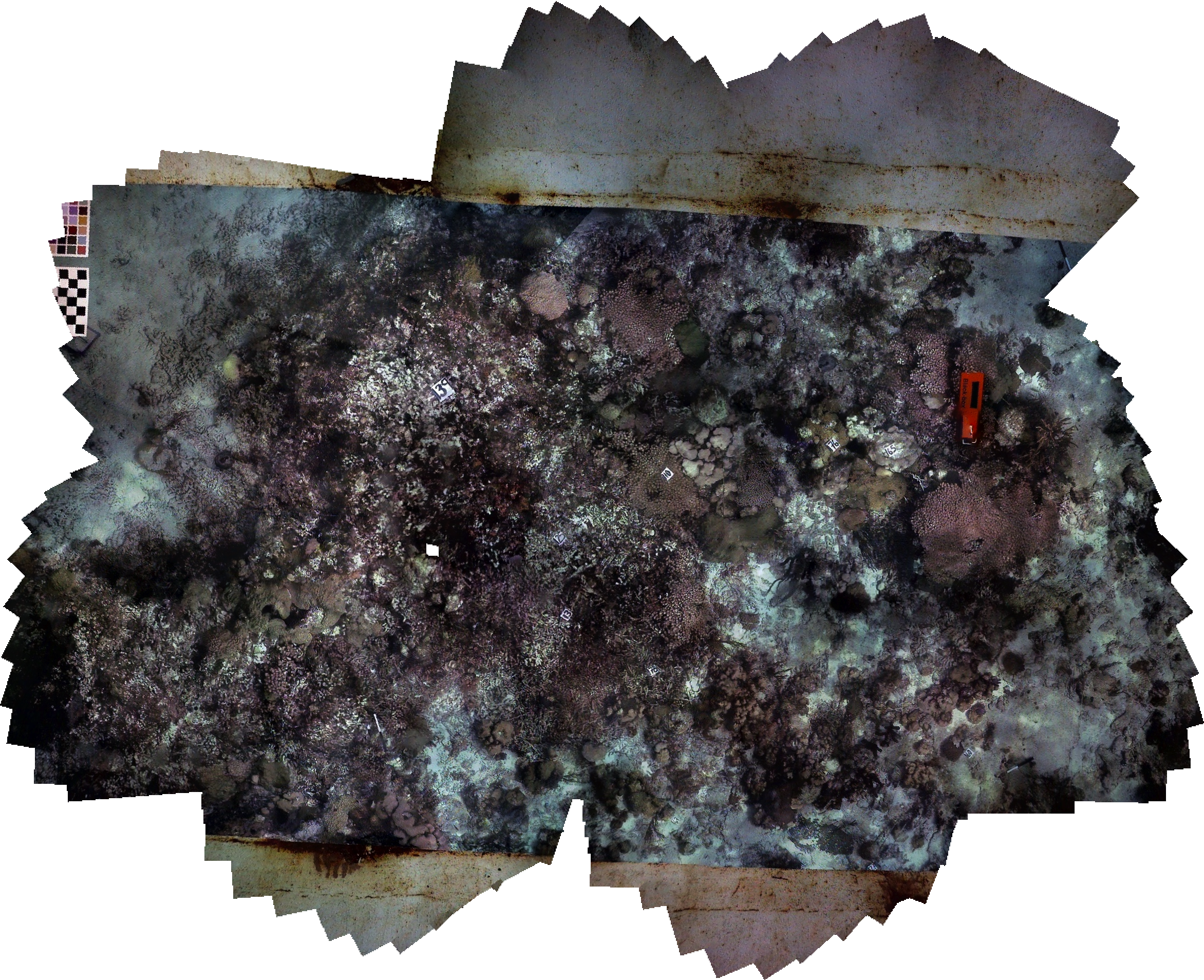
- The following image shows the photomosaic built after the survey mission (click on the image to download the photomosaic building video):
- Finally, the user loads the photomosaic in the GUI and specifies the second part of the mission. In this example, the user specifies an Object Recovery using a hooking technique:
Example of a full intervention mission: recovering a Black-Box
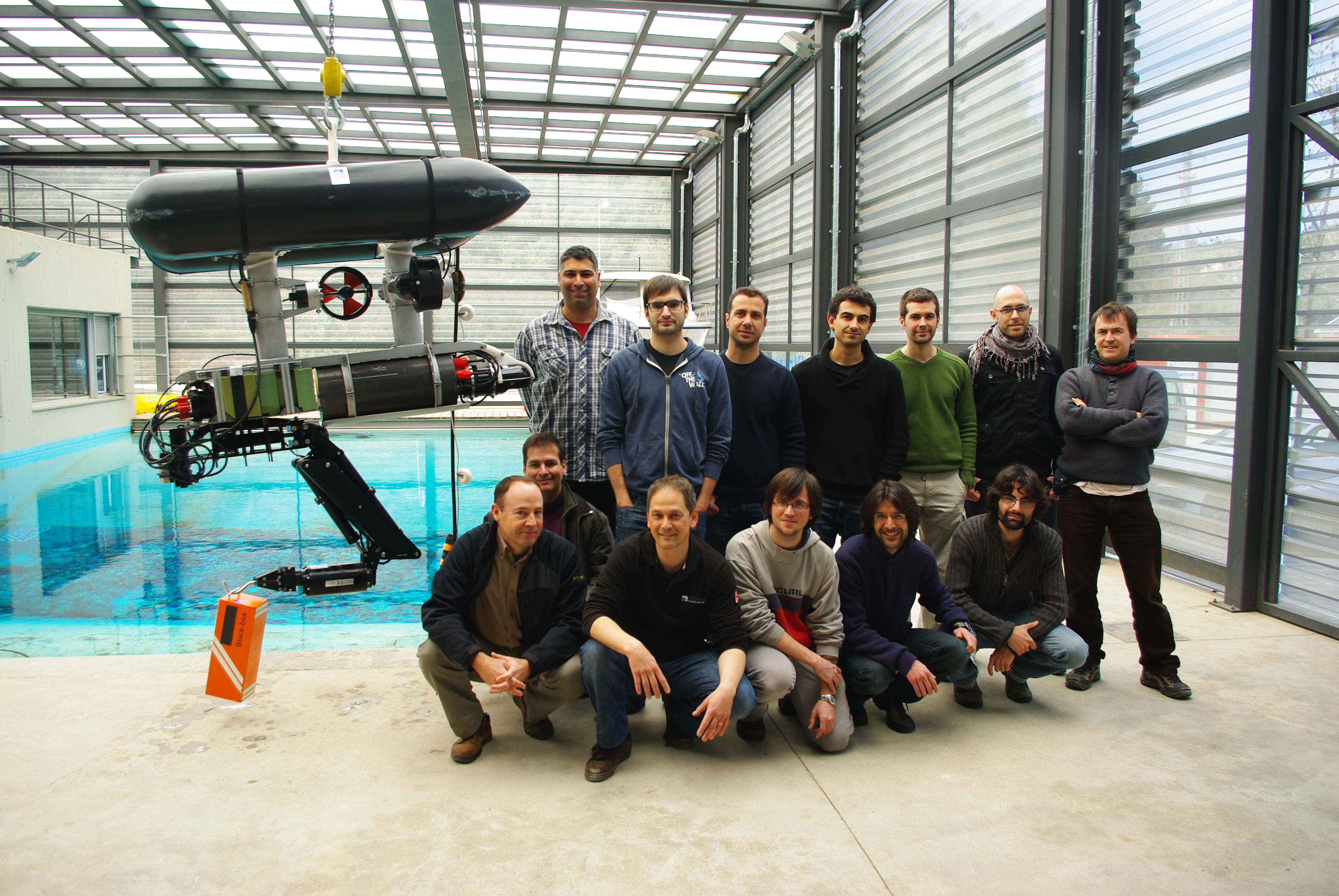
At the end, all the RAUVI team met together next to the robot. Unfortunately, not all the project members could be at Girona...
Sitemap
