







About the project
The main goal of the RAUVI project is to develop and improve the necessary technologies for autonomously performing an intervention mission in underwater environments. The approach can be summarized in two different steps: (1) survey and (2) intervention. Firstly, the I-AUV explores the region of interest, taking visual and acoustic data, synchronized with robot navigation. Then, the robot surfaces, and the information is downloaded to the base station, where a computer reconstruction of the explored region is built. By means of a specific human-robot interface to be developed, an operator identifies the object of interest and describes the task to perform. Next, the I-AUV robot navigates again to the region of interest, identifies the target object and performs the intervention task.
Therefore, the RAUVI project aims to design and develop an Underwater Autonomous Robot, able to perceive the environment by means of acoustic and optic sensors, and equipped with a robotic arm in order to autonomously perform simple intervention tasks.
Briefly, the main goals to achieve are the design and development of:
- A reconfigurable I-AUV for exploration and intervention tasks.
- The architecture in charge of robot navigation and I-AUV control, along with the planning and control mission system.
- A new hydraulic manipulator and its gripper.
- The control architecture and planning algorithms for manipulation.
- A multimodal 3D computer interface, including virtual and augmented reality techniques.
- New methods for visual motion estimation (mosaic building and dynamic positioning).
- Visual methods for target description and recognition.
Finally, several milestones are proposed, as experimental validation, in order to gradually take the I-AUV to realistic scenarios. Initially, a real prototype will be evaluated in water tank conditions, before the final evaluation in open sea conditions.
RAUVI is a join project funded by the Spanish ministry of Science and Innovation. The project is coordinated by Prof. Pedro J. Sanz from the University Jaume I and involves teams from 3 universities UJI, UdG and UIB. The UdG team is responsible for designing and developing the reconfigurable AUV, the UJI team is responsible for the design and development of the robotic arm and the UIB team is responsible for the vision based navigation. The project starts in January 2009 and lasts for 3 years.
 |
 |
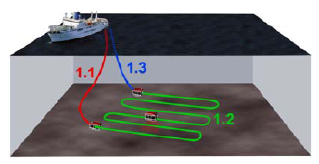
1. Survey Stage 1.1. Phase I: Launching 1.2. Phase II: Survey 1.3. Phase III: Recovery |
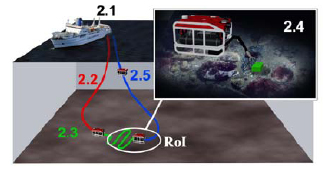
2. Intervention Satge 2.1. Phase IV: Intervention Specification 2.2. Phase V: Launching 2.3. Phase VI: Approaching 2.4. Phase VII: Intervention 2.5. Phase VIII: Recovery |
Here you can see an envisioned mission concept video (first simulation results):
Sitemap
