The methodology designed uses up to three heterogeneous vehicles cooperating in different configurations at each phase of the mission. A first stage is implemented with an Autonomous Underwater Vehicle (AUV) endowed with acoustic and optical sensors and a Surface vehicle (ASC) whose mission is the localization and supervision of the AUV and link it to the remote base. This configuration is used to elaborate, first, an acoustic map on which a second survey of the AUV is planned. Later, the AUV uses the optical sensors and moves closer to specific regions to record detailed information of potential targets. The data from these surveys, georeferenced by the ASC, permit obtaining an accurate 3D reconstruction of the area under study to plan the intervention stage. Next, an operator, using an HMI that includes a target recognition system, identifies the target and plans the manipulation stage. Finally, a Hybrid-ROV with a multifunctional system formed by a manipulator and a hoover carries out the supervised intervention task. During this stage, an AUV equipped with cameras stays close and supports the HROV operation providing images from an external viewpoint. This complementary information guarantees a robust and realiable manipulation, which is essential in archaeological missions. A good communication link between vehicles is important in all the stages of the mission, but critical during the last one. Hence, we will develop new wireless underwater communication systems, allowing the vehicles to exchange commands and images.
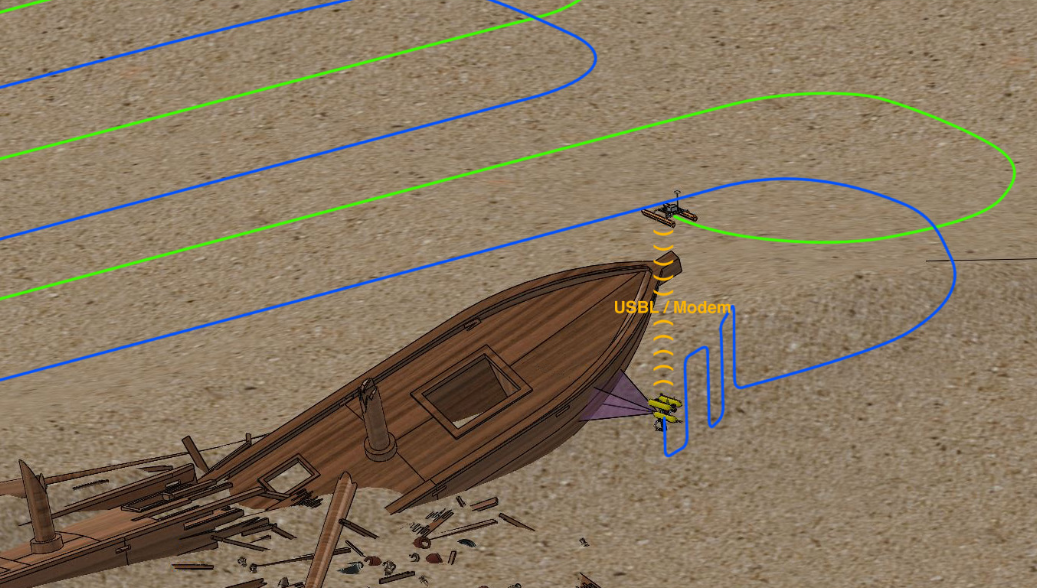
The application of the project has been focused in underwater archeology, although the same technologies could be applied in other scenarios. Two distinctive missions will be required to realistically face the problem.The first one (Fig. 1), cooperative survey, will comprise an autonomous survey of the seabed by means of an AUV assisted by a surface vehicle that provides absolute localisation and communication. The second mission (Fig. 2), cooperative intervention, will comprise a semi-autonomous intervention by means of an HROV assisted by an AUV providing an external view of the intervention.
|
|
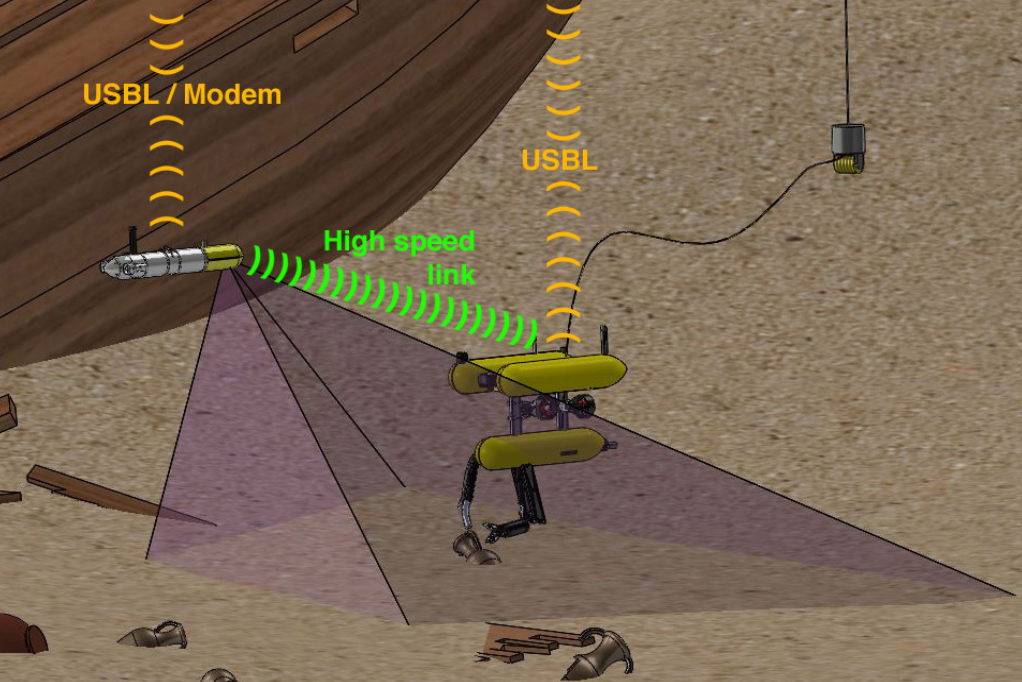 Fig. 2: Cooperative Intervention |