
You are here
About the project
TRITON is a marine robotics research project focused on the development of technologies really close to the real needs of the final user and, as such, it can facilitate the potential technological transfer of its results.
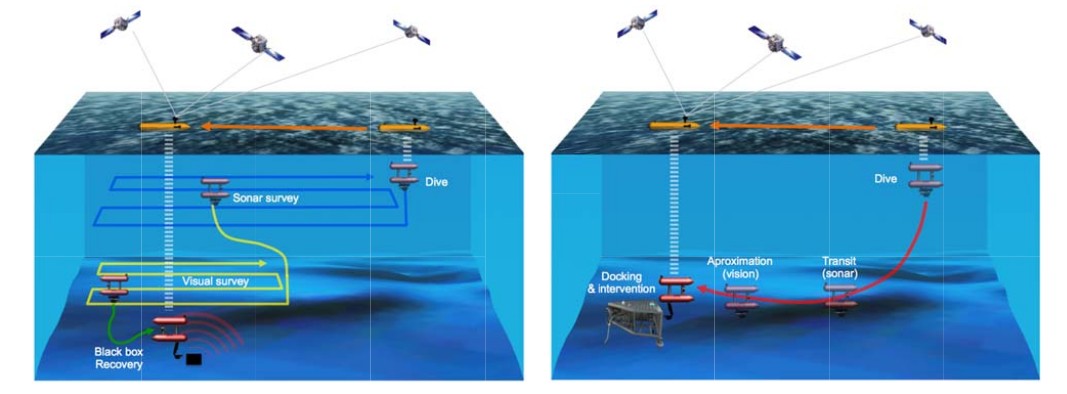
The scenarios chosen for the development and experimental validation of the project are: (1) “Search and Recovery” and (2) “Permanent Observatories”. Under (1) we will address the recovery of a typical airplane black box and under (2) we will carry out maintenance operations characteristic of permanent marine stations.
The project would not be viable without the technological developments reached by the ongoing national coordinated project under the DPI program entitled RAUVI, whose consortium is formed by the members that sign in the present proposal. Thanks to RAUVI, we count on a prototype of I-AUV from which, in only three years' time, we can carry out substantial improvements at the functional and operative levels with an amount of research investment that we can realistically assume. As this is really an interdisciplinary problem, the authors of the proposal undertake their scientific and technological contributions in three differentiated, albeit complementary, areas:
(a) Cooperative Robotics, led by subproject “COMAROB” at the UdG.
(b) Multisensorial Perception, led by subproject “VISUAL2” at the UIB.
(c) Autonomous Manipulation, led by subproject “GRASPER” at the UJI.
To sum up, the main scientific and technological challenges the project faces are:
1.- New navigation strategies within the context of cooperative robotics, where one AUV and one I-AUV, both presently available, will be used.
2.- Construction of maps and localization on the basis of both acoustic and optical information.
3.- Cooperative control architectures.
4.- Improvement of perceptual and representation capacities as well as scene and object identification through the use of stereoscopic vision systems combined with laser and acoustic information.
5.- Development and implementation of a user interface and a simulator to facilitate the specification of the intervention, including a characterization of 3D grasping.
6.- Functional improvement of grasping capacity and manipulation, including the necessary mechatronic and sensorial integration.
7.- Free-floating manipulation. If in the RAUVI project the problem of intervention was tackled in a simplified manner, decoupling the control of the arm and that of the AUV, we now assume a new challenge in which control techniques are developed to allow the use of the AUV degrees of freedom, in addition to the degrees of freedom of the arm-hand system, so as to facilitate the intervention.
In short, thanks, among others, to the work team that is being carried out in the RAUVI and FP7-TRIDENT projects, we have the necessary resources, the experience and the opportunity to face what the scientific community considers to be a truly technological challenge at present: solving, within the context of a marine intervention, the aforementioned applications, which have not been autonomously figured out to date, by using cooperative robotics, multisensorial perception and autonomous manipulation capacity.