
Active projects
CERN - IRS-Lab agreement
A general agreement to collaborate with the CERN research center in developing robots able to operate in the difficult access tunels in CERN subterranean instalations, especially in the Large Hadron Collider.
This is a very difficult environment in which to operate, as there are space restrictions, bad light conditions and strong electromagnetical fields.
As part of the agreement there is a join PhD between CERN and Jaume I University (with two students in 2019).
TWINBOT
TWIN roBOTs for cooperative underwater intervention missions: While commercially available Autonomous Underwater Vehicles (AUVs) are routinely used in survey missions, a new set of applications exist which clearly demand intervention capabilities. The maintenance of permanent underwater observatories, submerged oil wells, cabled sensor networks, pipes and the deployment and recovery of benthic stations are but a few of them. Nowadays, these tasks are addressed using manned submersibles or work-class ROVs (Remotely Operated Vehicle), equipped with teleoperated arms.
CIRTESU
Centro de Investigación en Robótica y TEcnologías SUbacuáticas
The IRS-Lab coordinates a consortium with two other UJI laboratories, Ingeniería del Diseño and Mecánica de Fluidos, and the CSIC-Centro de Investigaciones Marinas de Torreblanca to create a Research Center in Robotics and Submarine Technologies (CIRTESU).
This center will have their own aquatic instalations thanks to a FEDER grant (IDIFEDER/2018/013) inside the Jaume I University campus.
PROMETEO
The main objective of the project is to advance the state of the art of underwater robotics applied to interventions in archaeological sites. Thus, on the one hand, the semi-autonomous manipulation capacity in scenarios with occlusion of objects is being investigated, and on the other hand the improvement of the wireless communications system and the compression of images, in a way that allows (if necessary) the mobility of the submarine vehicle without umbilical. In addition, supervised control by the remote operator will be allowed, taking into account the restrictions of the network.
MERBOTS
MERBOTS aims at progressing in the underwater intervention systems development. To that end, we plan an extensive use of multirobot cooperation and multimodal perception systems. Nowadays, when the mission area is too deep and risky to be carried out by divers, the alternative consists in using remotely operated vehicles (ROV). This is a difficult and expensive solution requiring sophisticated support infrastructure and specialized personnel.
Past projects
TRITON

The main goal of TRITON is the use of autonomous vehicles for the execution of complex underwater intervention tasks. The project is focused on the use of several vehicles (an AUV and an I-AUV) running in a coordinated manner during the execution of a mission, and on the improvement of the manipulation capabilities already developed in RAUVI.
The project proposes two scenarios that demonstrate the capabilities to be developed: search and recovery of an object, and panel intervention in the context of underwater observatories, both to be developed autonomously.
Trident EU-FP7-Project
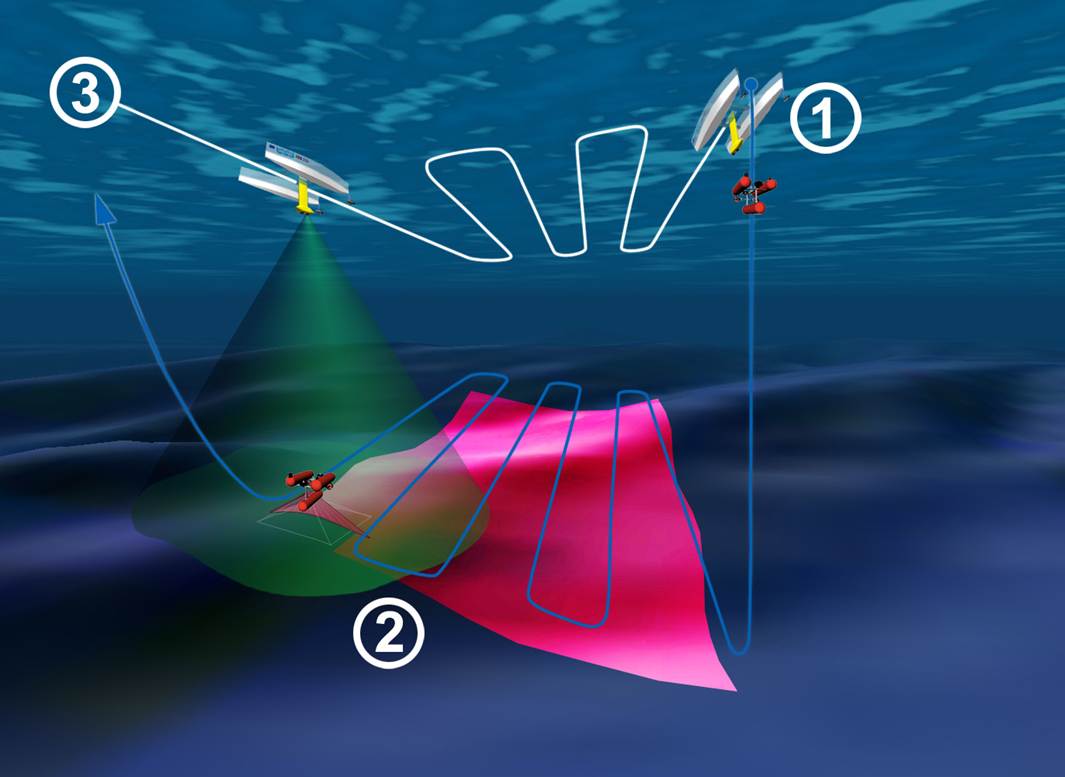 TRIDENT proposes a new methodology for multipurpose underwater intervention tasks with diverse potential applications like underwater archaeology,oceanography and offshore industries, and goes beyond present-day methods typically based on manned and / or purpose-built systems. Trident is based on new forms of cooperation between an Autonomous Surface Craft and an Intervention Autonomous Underwater Vehicle.
TRIDENT proposes a new methodology for multipurpose underwater intervention tasks with diverse potential applications like underwater archaeology,oceanography and offshore industries, and goes beyond present-day methods typically based on manned and / or purpose-built systems. Trident is based on new forms of cooperation between an Autonomous Surface Craft and an Intervention Autonomous Underwater Vehicle.
The new methodology will allow the user to specify an intervention task to be undertaken with regards to a particular target object, but afterwards, the object will be automatically recognised and manipulated by the robot in a completely autonomous way.
RAUVI
 The main goal of the RAUVI project is to develop and improve the necessary technologies for autonomously performing an intervention mission in underwater environments.
The main goal of the RAUVI project is to develop and improve the necessary technologies for autonomously performing an intervention mission in underwater environments.
RAUVI project aims to design and develop an Underwater Autonomous Robot, able to perceive the environment by means of acoustic and optic sensors, and equipped with a robotic arm in order to autonomously perform simple intervention tasks. Due to the complexity and multidisciplinary nature of the proposed goals, this project has been structured into three subprojects, including the I-AUV development, the robotic arm development, and the implementation of computer-based vision systems for vehicle and arm control.