
TRITON

The main goal of TRITON is the use of autonomous vehicles for the execution of complex underwater intervention tasks. The project is focused on the use of several vehicles (an AUV and an I-AUV) running in a coordinated manner during the execution of a mission, and on the improvement of the manipulation capabilities already developed in RAUVI.
The project proposes two scenarios that demonstrate the capabilities to be developed: search and recovery of an object, and panel intervention in the context of underwater observatories, both to be developed autonomously.
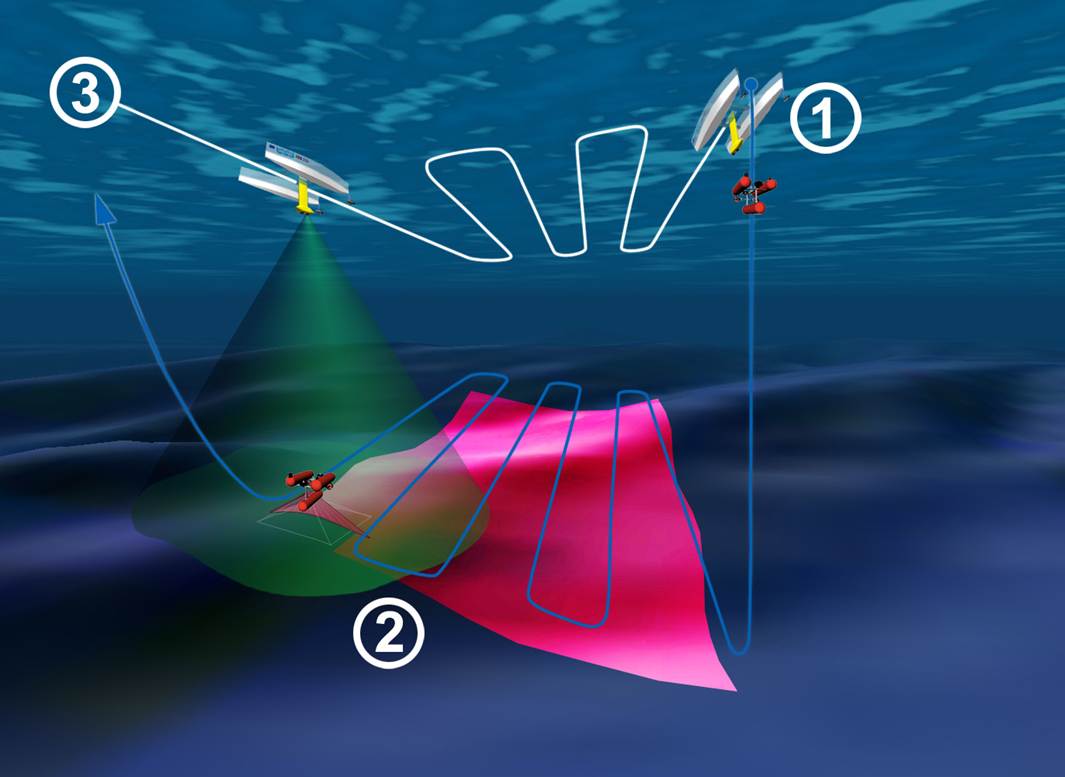 TRIDENT proposes a new methodology for multipurpose underwater intervention tasks with diverse potential applications like underwater archaeology,oceanography and offshore industries, and goes beyond present-day methods typically based on manned and / or purpose-built systems. Trident is based on new forms of cooperation between an Autonomous Surface Craft and an Intervention Autonomous Underwater Vehicle.
TRIDENT proposes a new methodology for multipurpose underwater intervention tasks with diverse potential applications like underwater archaeology,oceanography and offshore industries, and goes beyond present-day methods typically based on manned and / or purpose-built systems. Trident is based on new forms of cooperation between an Autonomous Surface Craft and an Intervention Autonomous Underwater Vehicle. The main goal of the RAUVI project is to develop and improve the necessary technologies for autonomously performing an intervention mission in underwater environments.
The main goal of the RAUVI project is to develop and improve the necessary technologies for autonomously performing an intervention mission in underwater environments.