
Welcome to the UWUI section!! Here you can find some information about this work, which is part of the RAUVI and TRIDENT projects.
This graphical user interface (GUI) has been developed by Juan Carlos García at the Interactive & Robotic Systems (Universitat Jaume I). Unlike other GUIs for underwater intervention/control, the UWUI has been developed focusing on the user easy-to-use experience, so it use does not requiere an expert user, due to the simplity of interaction: the menu and the button availability depends on the "intervention type" selected by the user.
Here are some screenshots with a short explanation about its features:
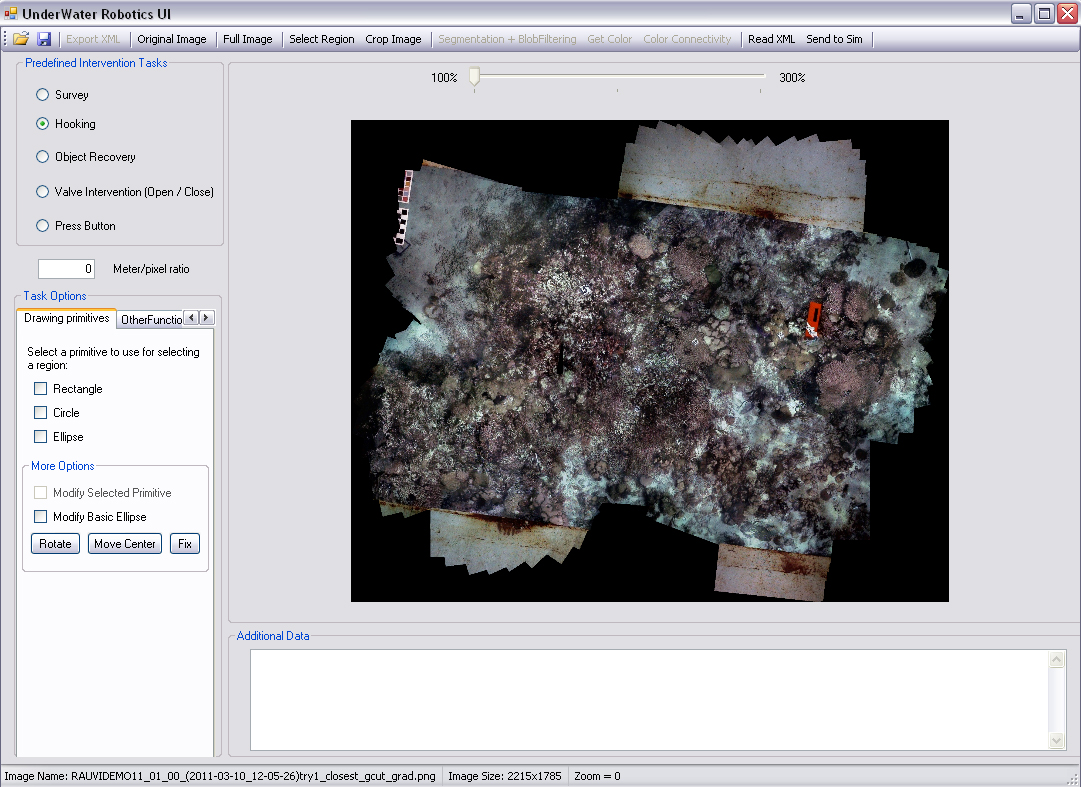
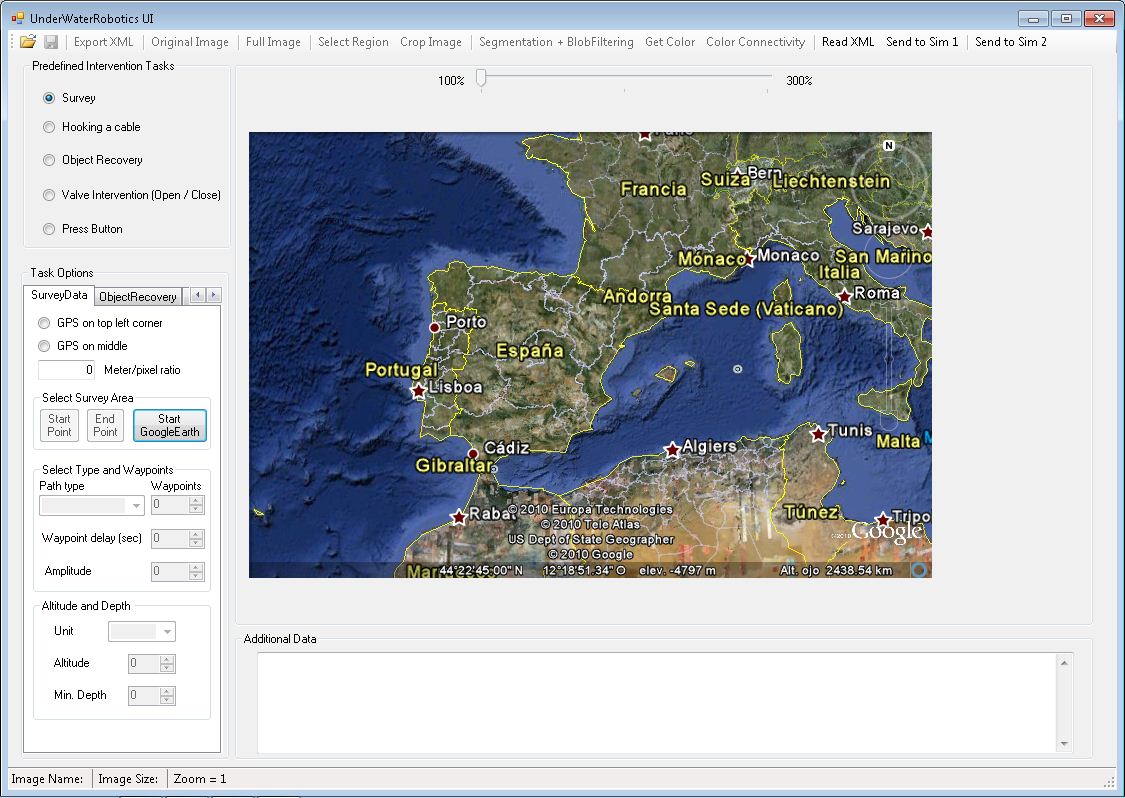
- The UWUI can load several types of image format files. In this screenshot, a photomosaic generated with images taken by the I-AUV, has been loaded.
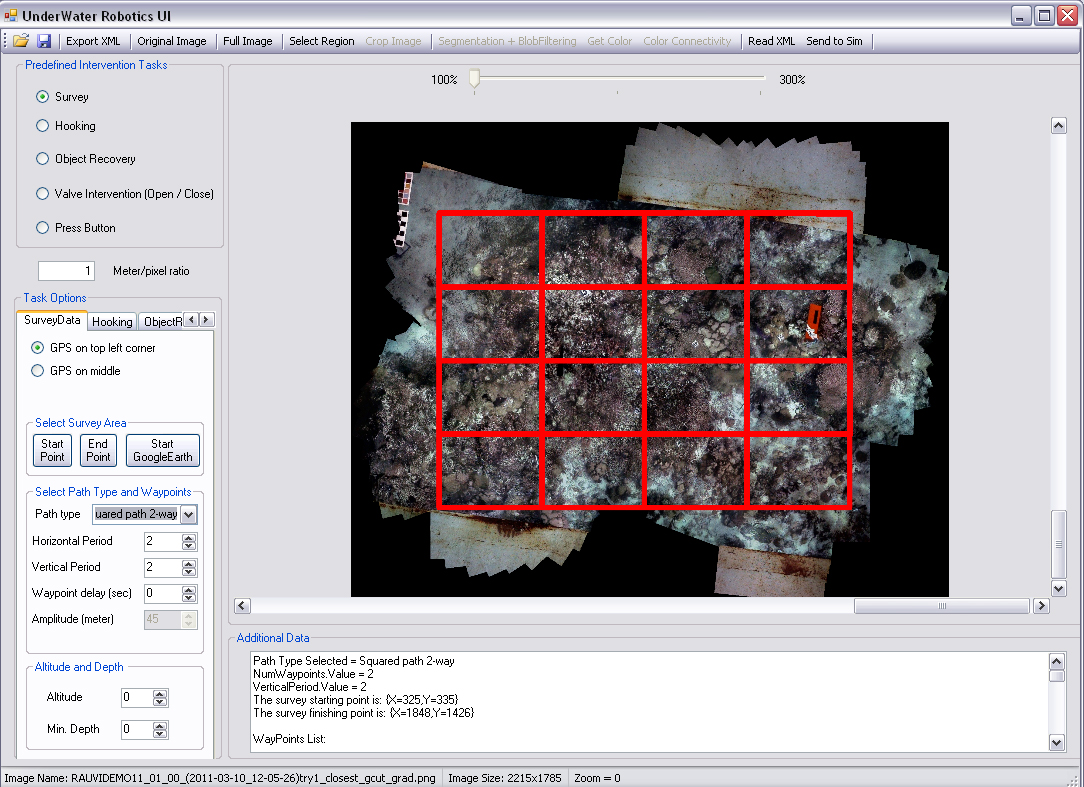
- The user can specify different types of path for the survey mission. If the image is georeferenced, the waypoints could be expresed in pixels (the origin is on the image top left corner) or in meters.
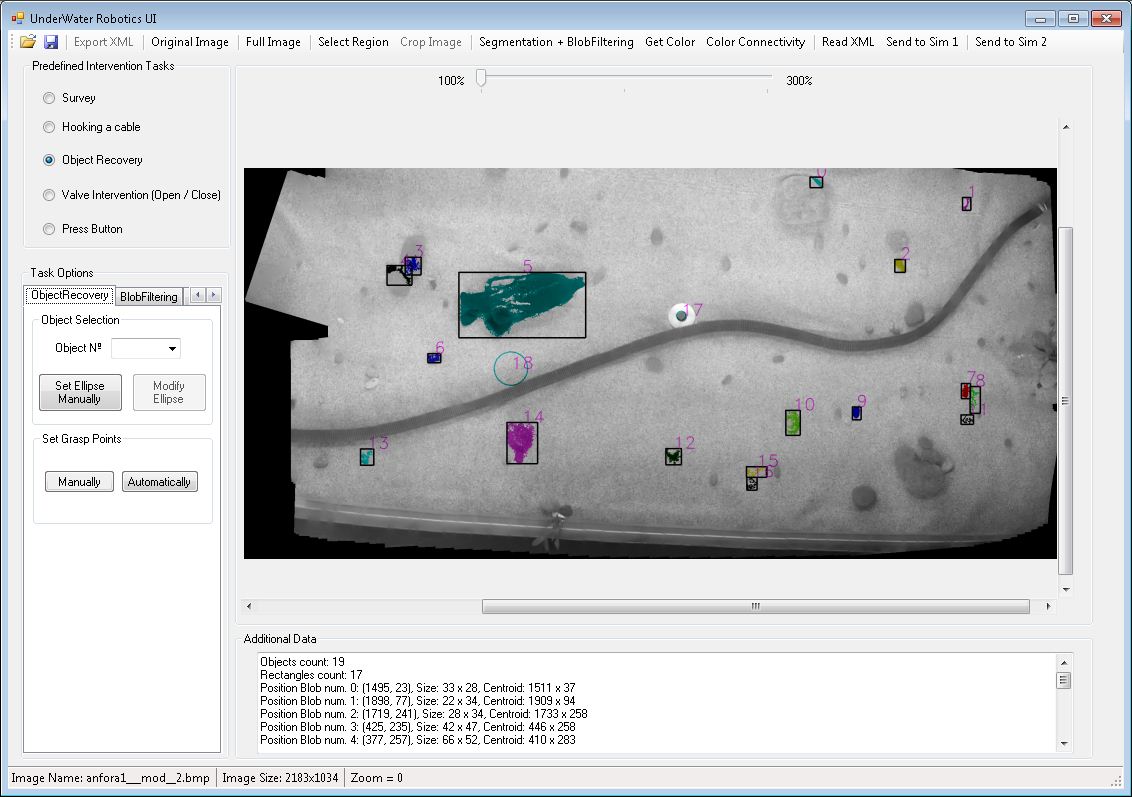
- The user has several methods to find the target and mark it. In this screenshot, the UWUI searches the most interesting objects in the image. Then, the user selects the identifier to get its properties and mark it as target.
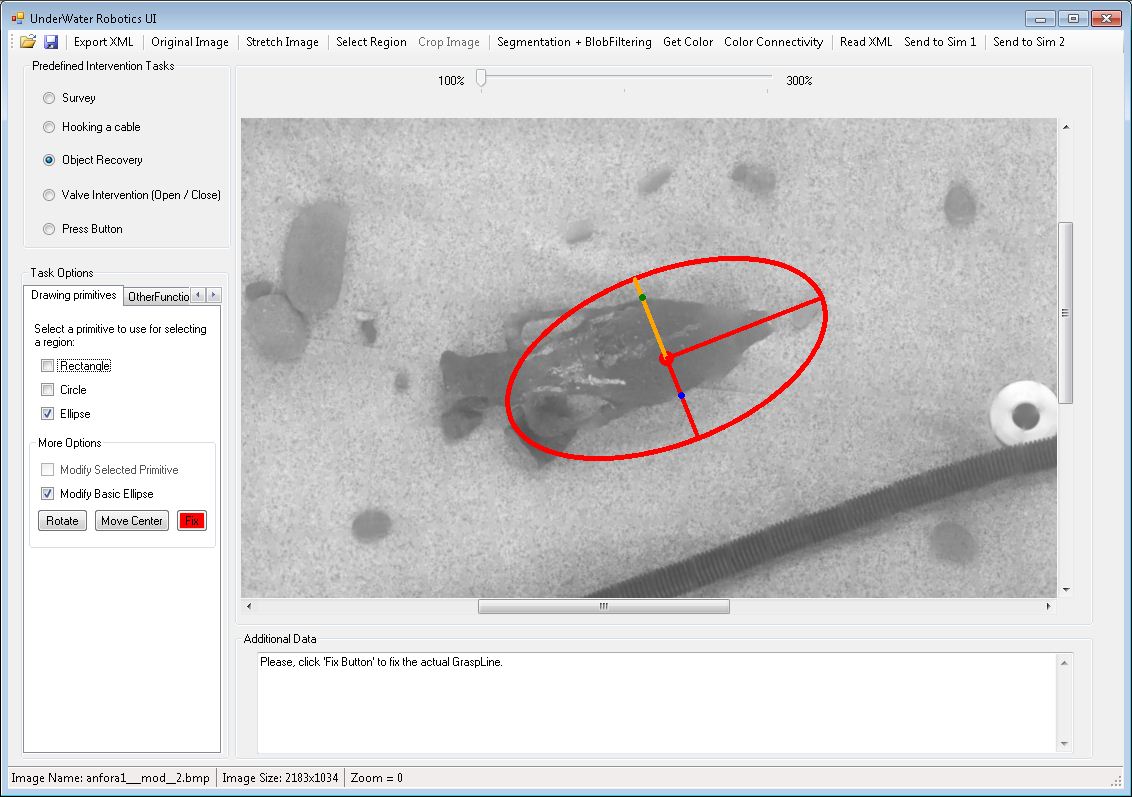
- Once the user has selected the target, an ellipse is placed over it to characterize the grasp. In addition, the user can select the grasping points manually drawing a line or automatically (like in the image). This intervention type could be an "object recovery".
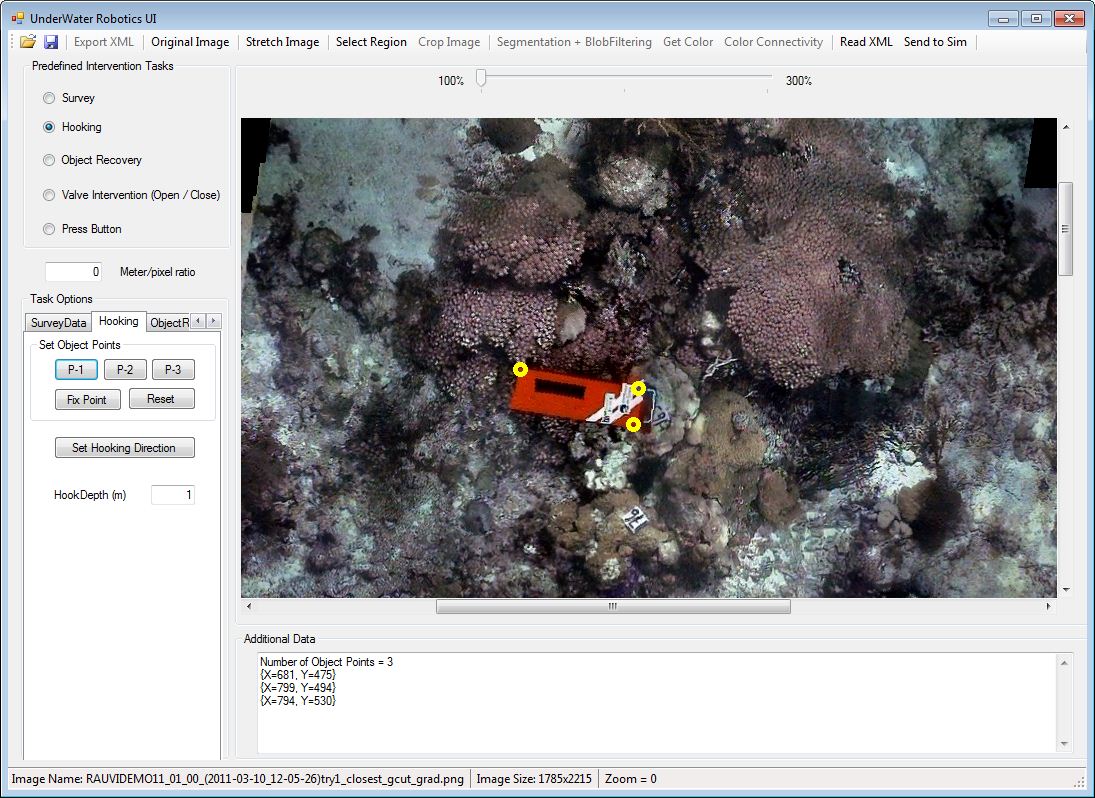
- If the intervention type is "hooking", the user could identify the object selecting three points of the object. Then, a boundig box will involve the object.
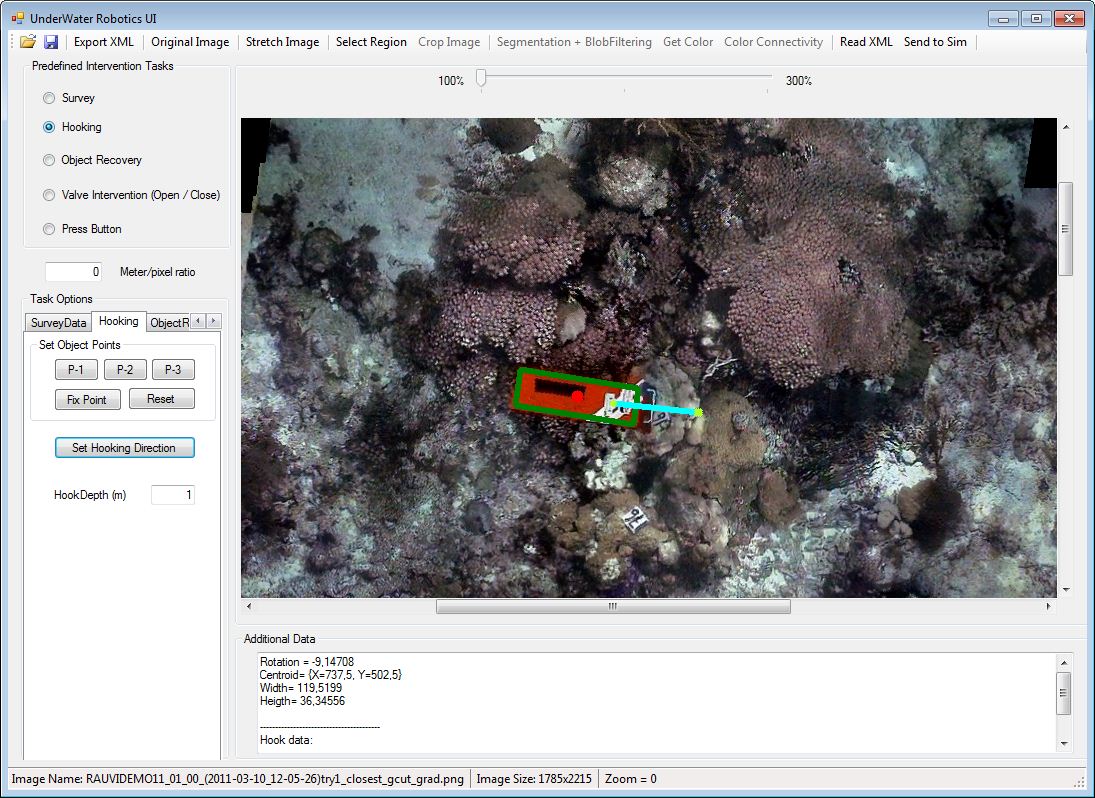
- The hook direction will be specified drawing a line from the starting point to the center of the object.
-
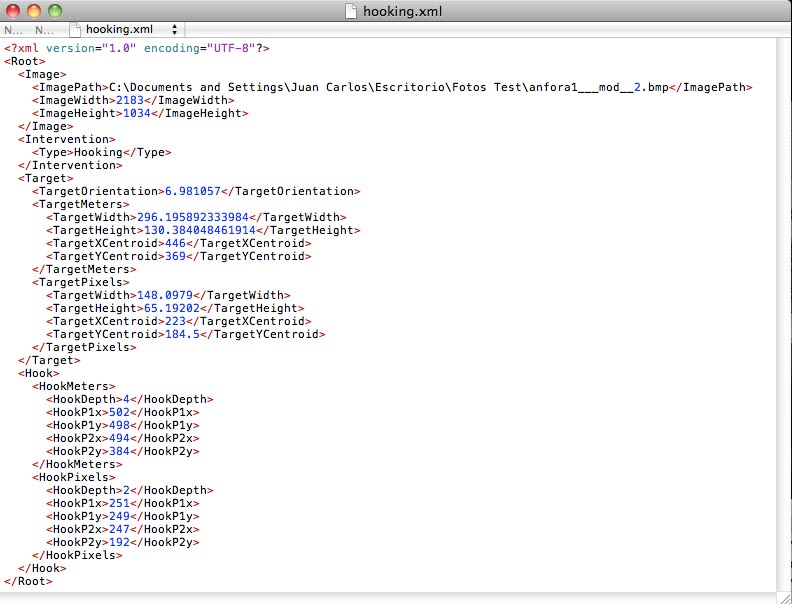
Once the intervention is completely defined, the user exports all the data in a XML file. The file data depends on the intervention type. In this case, in a hooking intervention, the data are:
- image name and properties (width and height)
- intervention type
- target properties (width and height) and centroid position
- hook initial and final points
- Furthermore, the UWUI has other functionalities which has not been finally developed, such as the GoogleEarth integration for the survey specification.
Now, here there are some the video - examples availables (Adobe Flash format):
- Specifiying a Survey.
- Specifiying an Object Recovery over an amphora.
- Specifiying an Object Recovery over an handsaw.
- Specifiying an Object Recovery over an hammer.
Finally, if you want to see a video with the interface and the simulator (UWSim), please, click here to download it (300MB).