IRS Lab
Research Lines:
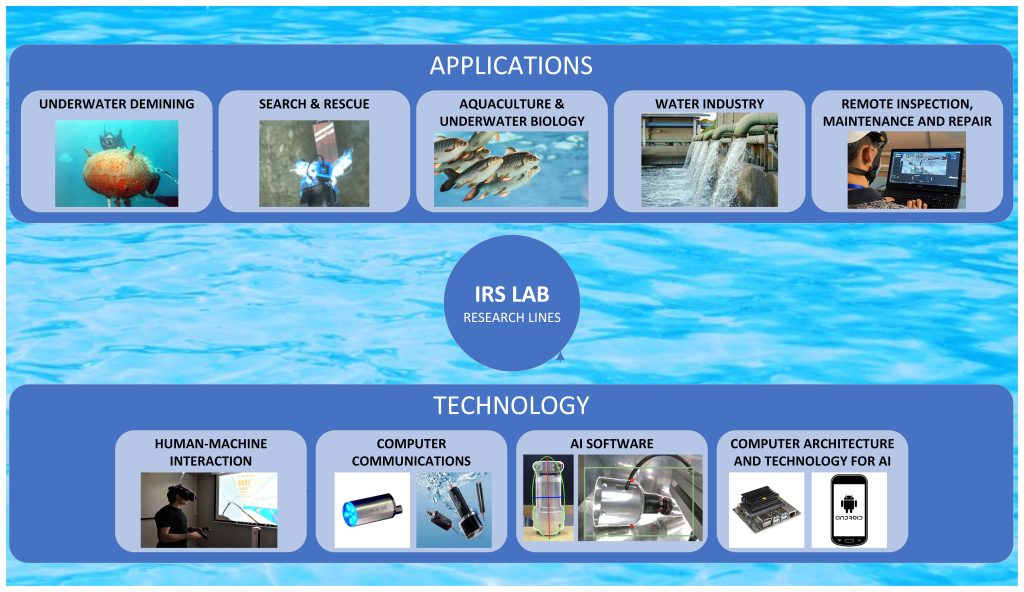
- Applications:
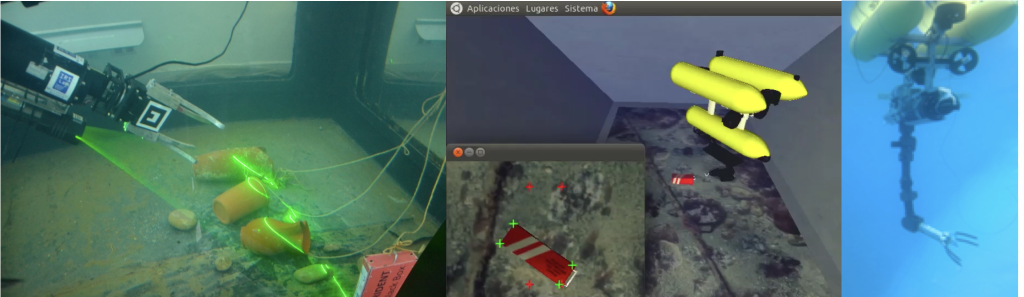
- Underwater Robotics Interventions with Mobile Manipulators
- Robotic Missions in Radioactive Scenarios (i.e. Accelerators at CERN)
- Computer Engineering Education Systems
- Medical Systems
- Industry 4.0
- Technology
- Human-Machine Interaction:
- 2D/3D User Interfaces for Telerobotics
- Remote Control of Computer-based Robotic Systems
- Multirobot & Multi-Operator Human-Robot Interaction
- Augmented Reality
- Virtual Reality
- Robotics Manipulation
- Grasping Determination
- Grasping Execution
- Multisensor techniques
- Computer Vision and Learning
- Computer Communications
- Underwater Wireless Communications (RF, Sonar, VLC)
- Internet protocols for Telerobotics (e.g. BTP)
- Network Automatic Control for Telerobotics
- Image Compression for Underwater Wireless Telerobotics (e.g. DEBT, Semantic Compression)
- AI Software
- Grasping Determination and Robotic Manipulation
- Computer Vision
- Visual Servoing for Robotic Control
- Neural Networks
- Computer Architecture and Technology for AI
- Embedded Systems
- Performance in Telerobotics
- Efficient systems for sustainability
- Human-Machine Interaction: